



























Phát hiện lỗi và sửa chữa máy nén khí Kobelco dòng AG và SG
Máy nén khí trục vít có dầu Kobelco dòng AG và SG là hai dòng phổ biến nhất của hãng sản xuất Kobelco (Nhật Bản). Cùng Minh Phú điểm qua một vài lỗi thường gặp của hai dòng máy này



Lọc dầu Sakura C6205
Giá bán: Liên hệ

Lọc dầu máy nén khí Atlas Copco GA 75+
Giá bán: Liên hệ

Lọc gió máy nén khí Atlas Copco GA 75+
Giá bán: Liên hệ

Lọc gió máy nén khí Atlas Copco GA 11
Giá bán: Liên hệ

Lọc gió máy nén khí Fusheng SA 75
Giá bán: Liên hệ

Lọc dầu máy nén khí Fusheng 55kw
Giá bán: Liên hệ

Lọc gió máy nén khí Fusheng 55kw
Giá bán: Liên hệ

Tách dầu máy nén khí Fusheng 55 kw
Giá bán: Liên hệ



Bộ tách nước khí nén SAMG 250
Giá bán: Liên hệ

Khớp nối mềm máy nén khí -Compressor Coupling
Giá bán: Liên hệ

Công tắc áp lực ( Pressure switch) máy nén khí...
Giá bán: Liên hệ

Hạt hút ẩm dùng cho máy sấy khí hấp thụ
Giá bán: Liên hệ

Máy nén khí Piston Hanshin 15HP
Giá bán: Liên hệ

Máy nén khí Hanshin Hàn Quốc
Giá bán: Liên hệ

Máy nén khí Sung Shin FORT 20
Giá bán: Liên hệ

Máy nén khí Sung Shin không dầu ZW
Giá bán: Liên hệ

Dầu máy nén khí SHL - SHL Compressor Oil
SHL là tên thường gọi của Shanhwa Lube Oil có nguồn gốc từ Hàn Quốc, là dòng dầu nhờn có hiệu suất cao, được tạo thành từ các nguyên liệu chất lượng cao, hệ thống sản xuất tiên tiến hiện đại, được thiết kế phù hợp với các dòng máy nén khí công nghiệp đảm bảo hoạt động ổn định của máy kể cả trong môi...
Tác hại nghiêm trọng khi sử dụng lọc tách dầu kém chất lượng!
Trên thị trường hiện nay rất khó để phân biệt hàng chính hãng với hàng giá. Đánh vào tâm lí giá rẻ của đám đông, người ta thường đưa ra những bộ lọc dầu giá rẻ để bán ra ngoài thị trường, những sản phẩm này tuy rẻ nhưng khi sử dụng về lâu về dài sẽ...
Phân biệt lọc dầu Kerry chính hãng và lọc dầu Kerry giả mạo
Qua quá trình so sánh đối chiếu, Minh Phú đúc kết ra được những điểm khác nhau giữa lọc dầu Kerry chính hãng và lọc dầu Kerry giả mạo muốn chia sẻ tới các bạn ngay trong bài viết này.
Tiêu chí lựa chọn dầu OEM máy nén khí
Sử dụng dầu OEM máy nén khí là giải pháp mang lại hiệu quả kinh tế cao, tiết kiệm thời gian bởi: giá thành dầu OEM không cao như giá thành dầu chính hãng, dầu OEM được phân phối rộng rãi và có tính ứng dụng cao, đối với dầu OEM máy nén khí, các hãng...
Cách phân biệt lọc Sakura thật và lọc Sakura giả mạo
Hàng nhái thường được thiết kế rất tinh vi tuy nhiên trong nhiều trường hợp khác những sản phẩm giả mạo có những dấu hiệu để nhận biết. SAKURA được đại diện của PT Selamat Sempurna Tbk đăng kí thương hiệu, đây là một bộ phận thuộc ADR-một tập đoàn...
Phụ tùng máy nén khí Micos
Công ty TNHH máy và dịch vụ kỹ thuật Minh Phú cung cấp Lọc dầu, Lọc gió, Tách dầu, Dầu máy nén khí và các phụ tùng thay thế dùng cho máy nén khí Micos. Khi quý khách hàng có nhu cầu bảo dưỡng, sửa chữa, tư vấn hoặc thay thế phụ tùng cho máy nén khí...
Bảng tra cứu phụ tùng máy nén khí Kobelco
Công ty TNHH máy và dịch vụ kỹ thuật Minh Phú chuyên sửa chữa, bảo dưỡng và cung cấp các phụ tùng thay thế : Dầu máy nén khí Kobelco, lọc dầu, tách dầu, lọc gió... dùng cho máy nén khí Kobelco. Khi quý khách có nhu cầu vui lòng liên hệ theo số điện...
Tra cứu mã phụ tùng máy nén khí Hitachi
Công ty TNHH máy và dịch vụ kỹ thuật Minh Phú chuyên Bảo dưỡng, sửa chữa và cung cấp phụ tùng máy nén khí Hitachi, Chúng tôi cam kết cung cấp hàng hóa với chất lượng cao, thời gian cung cấp nhanh, chế độ bảo hành một đổi một trong vòng 06 tháng...
Cách phân biệt lọc dầu Mann W962 chính hãng và lọc dầu Mann W962 giả mạo
Lọc Mann Filter sản xuất và nhập khẩu từ CHLB Đức là thương hiệu nổi tiếng toàn cầu bởi chất lượng và giá thành cạnh tranh, Có rất nhiều hãng máy nén khí đã đặt hãng Mann sản suất lọc cho hệ thống khí nén của họ như : Micos, Hanshin, Atlas Copco,...







Bảo dưỡng Máy nén khí Kobelco

Thay dầu Máy nén khí trục vít

Minh Phú - Cung cấp phụ tùng Máy nén khí

Bộ (Van) điều chỉnh áp suất khí nén

Máy sấy khí Atlas Copco

BẢO DƯỠNG, SỬA CHỮA MÁY NÉN KHÍ HANSHIN 37KW - 50HP

Van hằng nhiệt Máy nén khí
Lọc Mann Filter dùng cho Máy nén khí
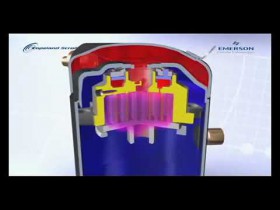
Nguyên lý hoạt động của Bock lạnh - Copeland Scroll Compressor

Minh Phú - Cung cấp Phụ tùng máy nén khí trục vít

Công tắc áp suất / Công tắc áp lực dùng cho Máy nén khí

Bảo dưỡng máy nén khí trục vít Micos

Dầu máy nén khí SHL - Hàn Quốc

Phát hiện và sửa lỗi vòng bi Máy nén khí

Tách dầu máy nén khí - Air / Oil Separator

Bảo dưỡng và sửa chữa máy nén khí HITACHI
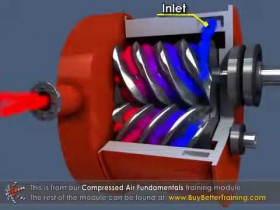
Compressed Air Fundamentals

Minh Phú - Sửa máy nén khí trục vít : Hanshin, Kobelco, Hitachi, Atlas copco, Fusheng, Micos....

VAN AN TOÀN MÁY NÉN KHÍ

Lọc dầu máy nén khí | Lọc dầu Mann Filter | Minh Phú- Chuyên gia máy nén khí

Vệ sinh hệ thống máy nén khí - www maynenkhitrucvit com vn
CUNG CẤP VÀ CHO THUÊ MÁY NÉN KHÍ

Máy nén khí Sungshin - Hàn Quốc

Thay lọc gió và Tách dầu máy nén khí

Bảo dưỡng máy nén khí Swan

Ca Phớt - Bạc lót trục dùng cho máy nén khí

Tại sao nên chọn Lọc dầu chất lượng tốt cho máy nén khí - Compressor Oil Filters

Hướng dẫn vệ sinh Lọc gió Máy nén khí

Sửa máy nén khí Piston

Bảo dưỡng hệ thống máy nén khí Micos 150 - Hàn Quốc
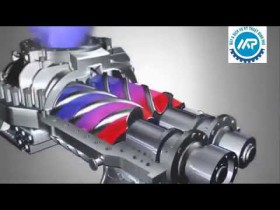
Cấu tạo và Nguyên lý hoạt động Đầu nén máy nén khí trục vít

Sửa chữa và bảo dưỡng máy nén khí Micos - Hàn Quốc
Đấu nối bộ điều khiển cơ cho máy nén khí trục vít Atlas copco,hanshin, kobelco, Hitachi..

Sửa chữa máy nén khí trục vít - Screw Compressor Repair

Nguyên lý làm việc của tách dầu máy nén khí - Air oil separator of compressor

BẢO DƯỠNG, SỬA CHỮA MÁY NÉN KHÍ SUNGSHIN
Sửa chữa máy nén khí trục vít

Bảo dưỡng và Sửa chữa Máy nén khí

Nguyên lý hoạt động máy nén khí cánh gạt - Rotary vane air compressor principle

Sửa chữa máy nén khí Micos 150

Air Compressor Explosion Prevention

Minh Phú - Dịch vụ Sửa máy nén khí Piston

Thước thăm dầu Máy nén khí

Van bi điều khiển khí nén, van khí nén

Súc rửa dàn giải nhiệt Máy nén khí

Bảo dưỡng Máy nén khí Hitachi

Sản phẩm Motul Supravis 46 dùng cho máy nén khí

Van cổ hút Máy nén khí trục vít

Nguyên lý làm việc máy nén khí

Sửa chữa máy nén khí Di động Airman, Komatsu..

Dầu máy nén khí SHL - SHL Compressor Oil
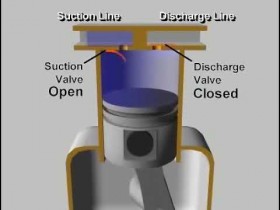
Nguyên lý hoạt động đầu nén máy nén khí piston

Bảo dưỡng máy nén khí Kaeser dòng CSD

Dịch vụ Bảo dưỡng hệ thống Máy nén khí tại Minh Phú

Mann Filter - Compressor Filters

Sửa chữa và bảo dưỡng máy nén khí Kobelco
Tách dầu máy nén khí hoạt động như thế nào?

Cung cấp và lắp đặt máy nén khí

Tách dầu máy nén khí Hitachi
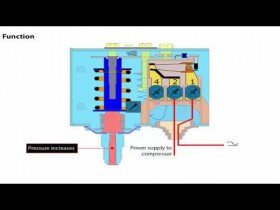
Nguyên lý làm việc công tắc áp lực

Sửa chữa máy nén khí trục vít

Cung cấp Tách dầu máy nén khí Hitachi, Airman..

Nguyên lý hoạt động của Động cơ điện 3 pha

Sửa máy nén khí

Tách dầu máy nén khí

MÁY NÉN KHÍ BOGE

Sửa chữa máy nén khí Swan

Nguyên lý hoạt động của Máy nén lạnh ( Block)

Cảm biến áp suất dùng cho máy nén khí

Bảo dưỡng, sửa chữa máy nén khí | Minh Phú - Chuyên gia máy nén khí

Minh Phú - Cung cấp: Lọc dầu, Lọc gió, Tách dầu, Dầu ... cho Máy nén khí

Ống hút gió Máy nén khí

Đấu nối Bộ điều khiển cho Máy nén khí trục vít

Sửa Motor máy nén khí Micos 160kw

Tách dầu máy nén khí Kobelco

Hướng dẫn kiểm tra và thay thế van áp suất tối thiểu máy nén khí

Sửa chữa máy nén khí Micos 150

Thước thăm dầu Máy nén khí / Oil level indicator

Van điện từ xả nước tự động ( có hẹn giờ) dùng cho hệ thống khí nén



















